|
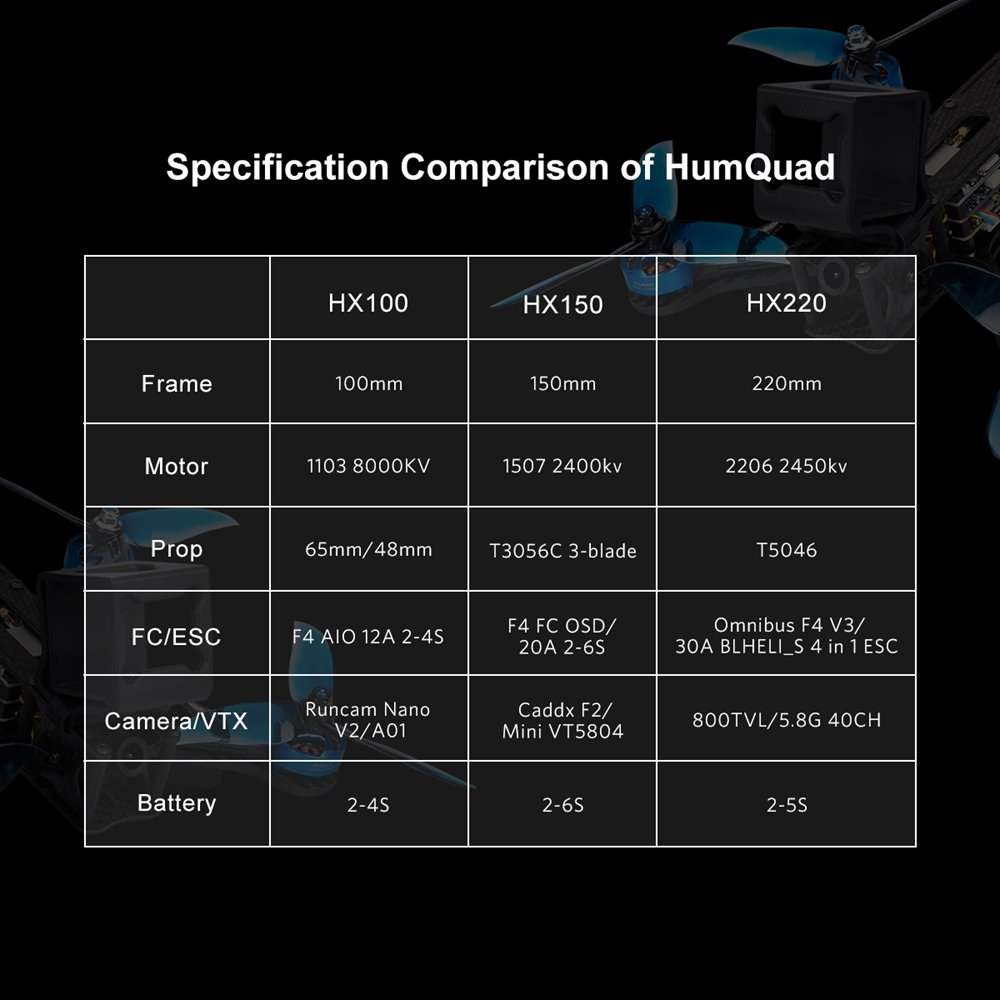
Radstand: 220mm
Gewicht: 356g (ohne Akku)
Rahmenarm: 4mm (Kohlefaser)
Motoren: 2206 2450KV
Requisiten: 5 Zoll Requisiten
Kamera: 1179 800TVL CCD
VTX: 5.8G 40CH 25MW 200mw 600MW umschaltbarer Sender
Flugzeit: 12mins mit 450mAh 3S-Akku (reibungsloser Flug in einer windstillen Umgebung)
NO.OF-Zelle: 3-4S
Omnibus F4 V3 Flight Controller:
Größe: 36x36mm
Befestigungslöcher: 30.5x30.5mm
STM32 F405 MCU, führt die Betaflight 3.5.2-Firmware aus und kann eine schnellere Loop-Zeit ausführen.
Die Verwendung der F4-MCU steuert das OSD über den SPI-Bus im DMA-Modus.
Die OSD-Konfiguration wurde in die Betaflight-Benutzeroberfläche aufgenommen.
SBUS / PPM-Eingang (Pinheaders)
6PWM-Ausgabe (1-4Pinheaders und Sh1.0-Stecker, 5-6 als Pinheaders)
Mit Barometer
SPI-Sensor MPU6000
Inklusive 128Mbit Flash, bitte immer BEC für den FC verwenden.
Unterstützt von BETAFLIGHT und dRonin
HumQuad 30A BLHELI_S 4in1 ESC
Con. aktuell: 30A
Spitzenstrom (10S): 35A
Eingangsspannung: 2-5S
BEC: 5V-Ausgabe
Programmierung: JA
Firmware: blheli_s
Gewicht: 28g
Größe: 36 * 36MM
Kamera und VTX
HumQuad 1179 800TVL CCD-Kamera
Farbe lila
Sensor: CCD
Auflösung (horizontale Mitte): 800TVL
Gehäusegröße: 25mm * 25mm
Gewicht: 11g
Auflösung: PAL: 1980H × 1080 (2 MP)
Format: PAL
Videoausgang: 1.0Vp-p / 75Ω
Automatische Verstärkungsregelung: 0.25 / 0.50 / 0.75 / 1.00 einstellbar, bis zu 55dB.
AWB: EIN / AUS
Belichtungsmodus: Elektronenbelichtung
Elektronischer Verschluss: 1 / 50 (1 / 60) - 1 / 100000 S
Gamma-Korrektur: 0.45 / 1.0
Synchronisationsmethode: Interne Synchronisation
Objektiv: Standard 2.8mm Objektiv
Arbeitsspannung: DC12V (Weitspannung, gemessen, die in 5-13V arbeiten kann)
Arbeitsstrom: 70mA (geringer Stromverbrauch)
Arbeitstemperatur: -20 - 60
Luftfeuchtigkeit: 0% ~ 98%
Starke Hintergrundbeleuchtung
Requisiten
Farbe blau
Menge: 1pair
Montagebohrung: 5mm
|